
Symbiotic Multi-Robotics Autonomy Mesh
Our Mission
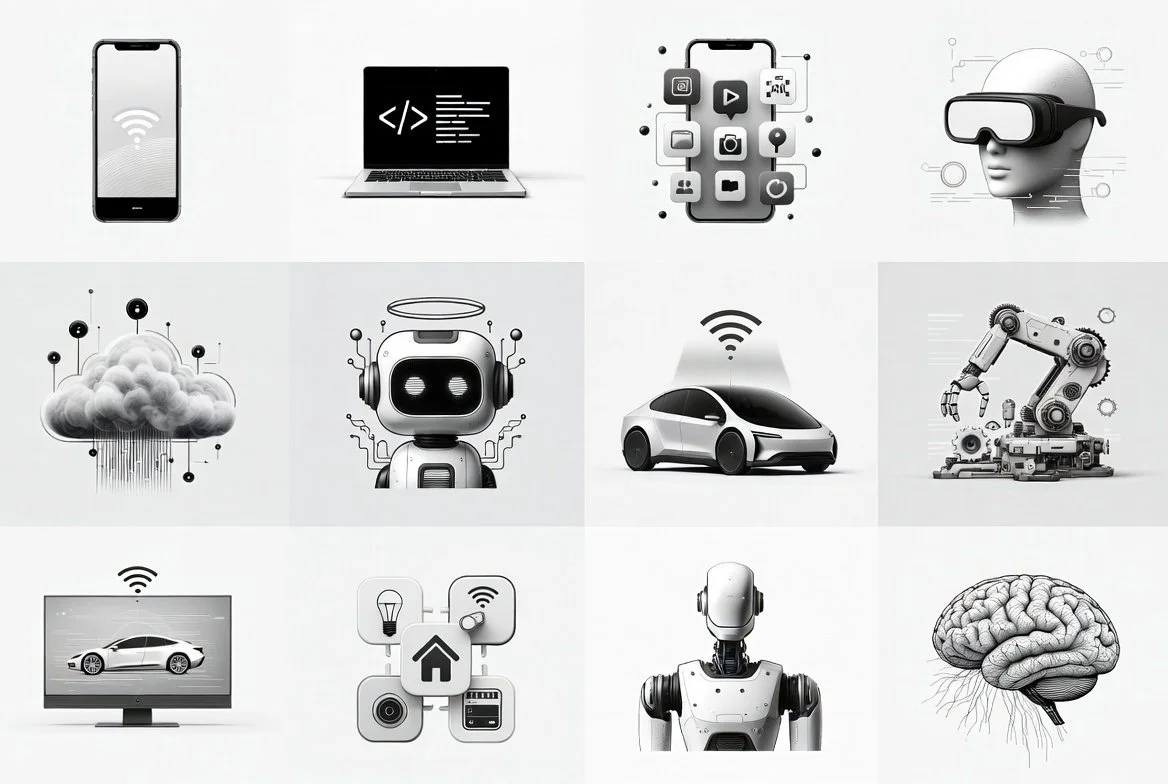
To pioneer and commercialize a (or multiple) symbiotic multi-robotics autonomy mesh as a comprehensive research, innovation, and development initiative that unifies heterogeneous robotic systems into a single, self-orchestrating ecosystem to significantly improve human living.
By integrating stationary compute infrastructure, portable personal interfaces, mobile locomotion platforms, and humanoid dexterous embodiments under a shared AI-driven control fabric, the program delivers seamless collaboration across all mobility and capability tiers. Core objectives include advancing distributed autonomy algorithms, real-time mesh synchronization protocols, and symbiotic human-robot interaction frameworks.
Robotics Autonomy
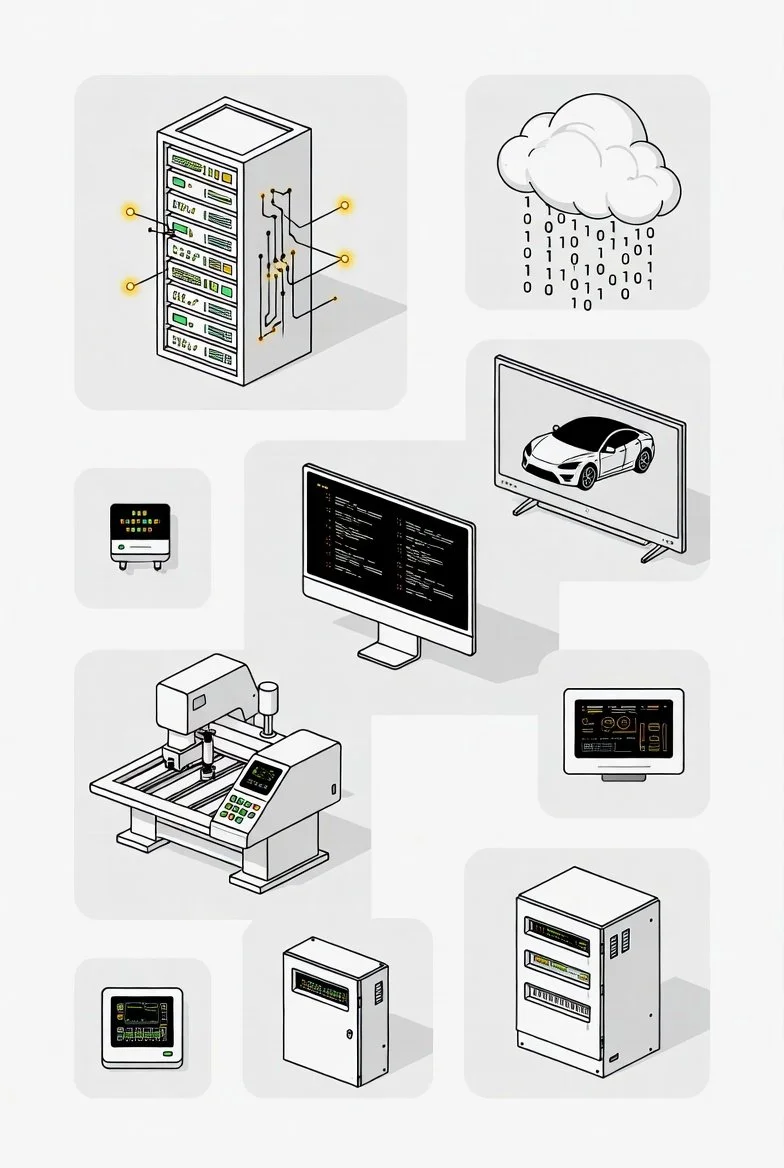
Stationary Robotics (Fixed Location)
Stationary Robotics forms the stable computational backbone of the Symbiotic Multi-Robotics Autonomy Mesh. Fixed-location assets such as servers, cloud nodes, smart TVs, industrial CNC machines, power substations, and building automation systems deliver continuous high-performance processing, data storage, and orchestration. These always-on platforms provide the shared intelligence layer that coordinates the entire mesh, enabling real-time decision-making, predictive maintenance, and seamless resource allocation across all mobility tiers. Their reliability and scalability make them the silent foundation upon which portable, mobile, and humanoid systems depend for mission-critical insights and synchronized autonomy.
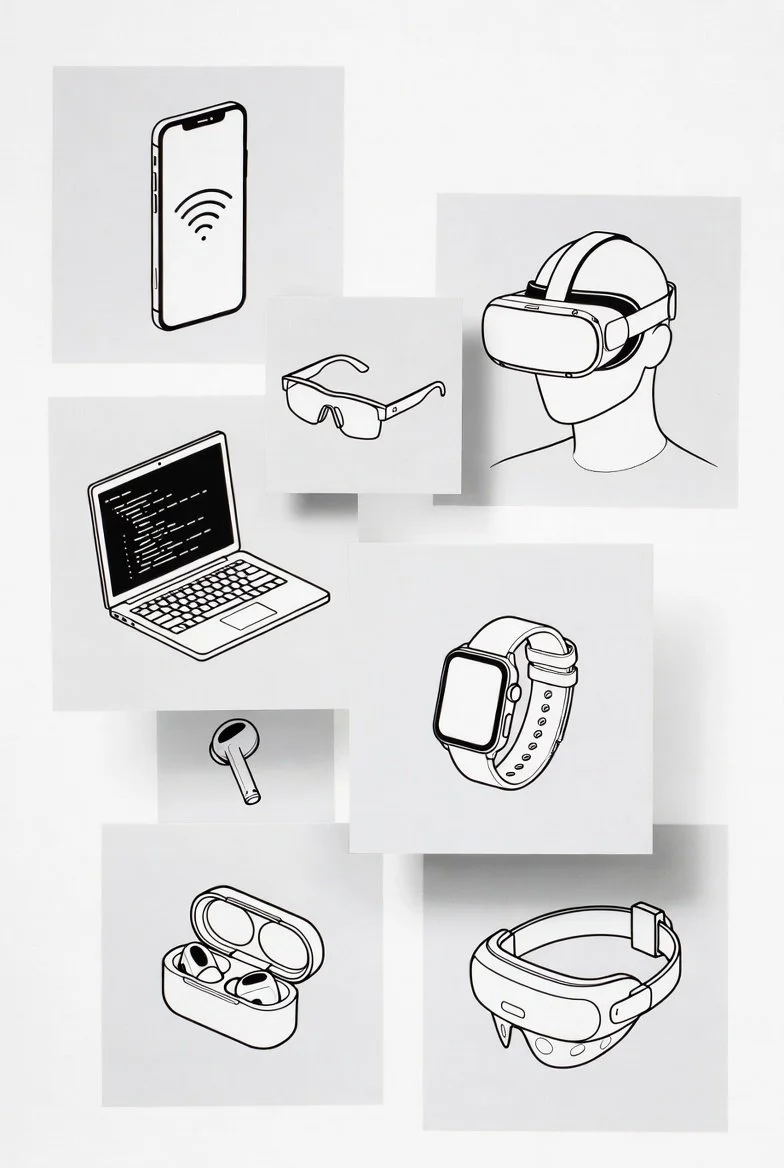
Portable Robotics represents the personal extension layer of the Symbiotic Multi-Robotics Autonomy Mesh. Lightweight, human-carried devices — smartphones, tablets, AR/VR headsets, smart glasses, wearables, and neural interfaces — deliver intimate, context-aware interaction and edge intelligence. These always-with-you nodes act as sensory gateways and personalized control surfaces, bridging human intent directly to the larger mesh while maintaining seamless handoff between stationary infrastructure and mobile platforms.
Portable Robotics (No Self-Locomotion)
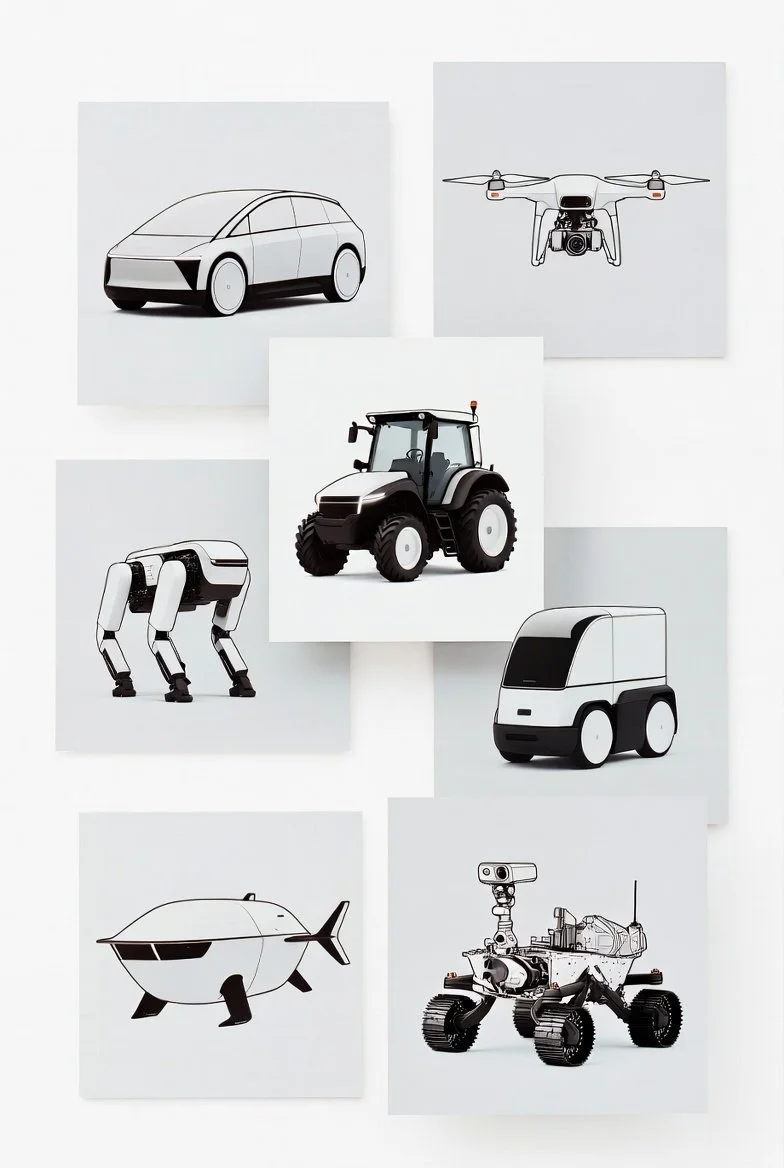
Mobile Robotics (Self-Propelled)
Mobile Robotics constitutes the dynamic locomotion layer of the Symbiotic Multi-Robotics Autonomy Mesh. Self-propelled platforms (e.g. autonomous vehicles, drones, rovers, delivery bots, agricultural machinery, satellites, and underwater/surface vessels) provide physical reach, logistics, and environmental interaction at scale. These agile entities execute coordinated missions while maintaining continuous communication with stationary infrastructure and portable interfaces, forming the mobile nervous system of the mesh.
Humanoid & Dexterous Robotics
Humanoid & Dexterous Robotics forms the ultimate manipulation and collaboration layer of the Symbiotic Multi-Robotics Autonomy Mesh. Bipedal humanoids, robotic arms, exoskeletons, and multi-fingered hands deliver human-like dexterity, social presence, and fine-motor precision. These advanced embodiments integrate seamlessly with all other groups, enabling complex physical tasks and natural human-robot interaction at the frontier of the mesh.

Symbiotic Multi-Robotics Autonomy Mesh
"Imagination is more important than knowledge. For knowledge is limited, whereas imagination embraces the entire world, stimulating progress, giving birth to evolution."
— Albert Einstein